top of page
Sand Rover
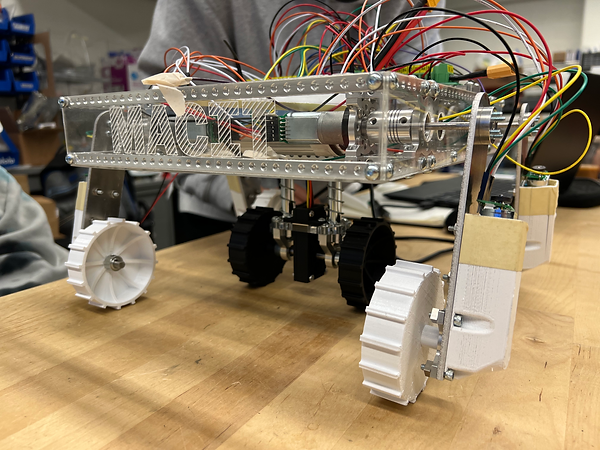
This project aims to build a rover capable in both inchworming and crawling motions along with a real time distance monitoring and controlling through LabVIEW GUI

IMG_0742

IMG_0741

IMG_0745
IMG_0742
1/5
With the exception of the rover frame, motors, as well as nuts and bolts, all parts are 3D printed and laser cut. These pieces are made to cover the rover from incoming sand.
We learned important lessons as we encountered technical and team challenges, such as where to put the distance tracker so that it doesn't obstruct motion and to test our microcontroller capabilities early on.
Shown below is our LabVIEW GUI running on a dummy code.
bottom of page